克鲁斯卡尔算法和普里姆算法,两种常用最小生成树算法的比较 克鲁斯卡尔算法和普里姆算法的区别适合什么图
本文主要涉及的问题是克鲁斯卡尔算法和普里姆算法,这两种算法都是常用的最小生成树算法。在本文中,我们将对这两种算法进行详细的比较和解释。
1. 什么是最小生成树算法?
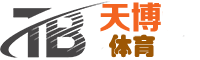
最小生成树算法是在一个连通无向图中,找出一棵生成树,使得这棵生成树的所有边的权值之和最小。最小生成树算法可以用来解决许多实际问题,如 *** 设计、电路设计等。
2. 克鲁斯卡尔算法的原理是什么?
克鲁斯卡尔算法是一种贪心算法,它的基本思想是先将所有边按照权值从小到大排序,然后依次将边加入生成树中,直到生成树中包含了所有的顶点为止。
具体来说,我们可以将所有的顶点看作是一个独立的 *** ,然后逐步合并这些 *** 。在每一次合并的过程中,我们选择一条权值最小的边,将它的两个端点所在的 *** 合并成一个 *** 。这样,当所有的顶点都在同一个 *** 中时,生成的树就是最小生成树。
3. 普里姆算法的原理是什么?
普里姆算法也是一种贪心算法,它的基本思想是从一个任意的顶点开始,不断地向生成树中添加边,直到生成树包含了所有的顶点为止。
具体来说,我们首先将一个任意的顶点加入生成树中,然后将这个顶点所连接的所有边按照权值从小到大排序。然后依次将这些边加入生成树中,如果加入的边所连接的顶点不在生成树中,就将它们加入生成树中。这样,当所有的顶点都在生成树中时,生成的树就是最小生成树。
4. 克鲁斯卡尔算法和普里姆算法的时间复杂度分别是多少?
克鲁斯卡尔算法的时间复杂度是O(ElogE),其中E表示边的数量。因为我们需要对所有的边进行排序,所以时间复杂度是O(ElogE)。另外,在合并 *** 时,我们需要使用并查集来判断两个顶点是否在同一个 *** 中,这也需要O(ElogE)的时间复杂度。
普里姆算法的时间复杂度是O(ElogV),其中V表示顶点的数量。因为我们需要对每个顶点的边进行排序,所以时间复杂度是O(ElogV)。另外,在加入边的过程中,我们需要使用优先队列来维护边的顺序,这也需要O(ElogV)的时间复杂度。
5. 克鲁斯卡尔算法和普里姆算法的优缺点分别是什么?
克鲁斯卡尔算法的优点是简单易懂,实现容易。它的缺点是时间复杂度较高,特别是在边的数量很大的时候,效率会非常低。
普里姆算法的优点是时间复杂度较低,特别是在顶点的数量远大于边的数量时,效率会非常高。它的缺点是实现稍微复杂一些,需要使用优先队列来维护边的顺序。
6. 在什么情况下应该选择克鲁斯卡尔算法?在什么情况下应该选择普里姆算法?
如果边的数量很大,而顶点的数量比较小,应该选择克鲁斯卡尔算法。因为在这种情况下,克鲁斯卡尔算法的时间复杂度要比普里姆算法低。
如果顶点的数量很大,而边的数量比较小,应该选择普里姆算法。因为在这种情况下,普里姆算法的时间复杂度要比克鲁斯卡尔算法低。
7. 最小生成树算法还有哪些扩展和应用?
最小生成树算法的扩展和应用还有很多,比如带权图的最短路径问题、 *** 流问题、最小斯坦纳树问题等。在实际应用中,最小生成树算法也被广泛应用于 *** 设计、电路设计、交通规划、城市规划等领域。
总之,最小生成树算法是一种非常重要的算法,在实际应用中有着广泛的应用前景。对于不同的问题和应用场景,我们需要选择不同的最小生成树算法来解决问题。










评论